 2月9日(月):
火星のフローガーグ・クレータの周辺を飛ぶ (マーズ・エクスプレス)
2月9日(月):
火星のフローガーグ・クレータの周辺を飛ぶ (マーズ・エクスプレス)

ヨーロッパ宇宙機関のマーズ・エクスプレスは、火星の南の高地を横断する、フローグルグ・クレータの旅をまとめた。
 このビデオは、左と右のスキュラ・スコプルスとカリュブディス・スコプルスという、急勾配でほぼ平行な2つの崖に囲まれた地面の帯を辿ることから始まります。この地盤の「経路」はグラーベンと呼ばれ、プレートが引き裂かれることで形成されます。幅約75km、深さ約1kmの大きさです。
このビデオは、左と右のスキュラ・スコプルスとカリュブディス・スコプルスという、急勾配でほぼ平行な2つの崖に囲まれた地面の帯を辿ることから始まります。この地盤の「経路」はグラーベンと呼ばれ、プレートが引き裂かれることで形成されます。幅約75km、深さ約1kmの大きさです。
左側には幅150kmの目立つバクハイセン・クレーターが見えます。
カメラはさらに北へ進み、遠くのフローガーグ・クレーターに近づいています。火口の東側に沿って進み、左に回り込んで西側の縁で終わります。
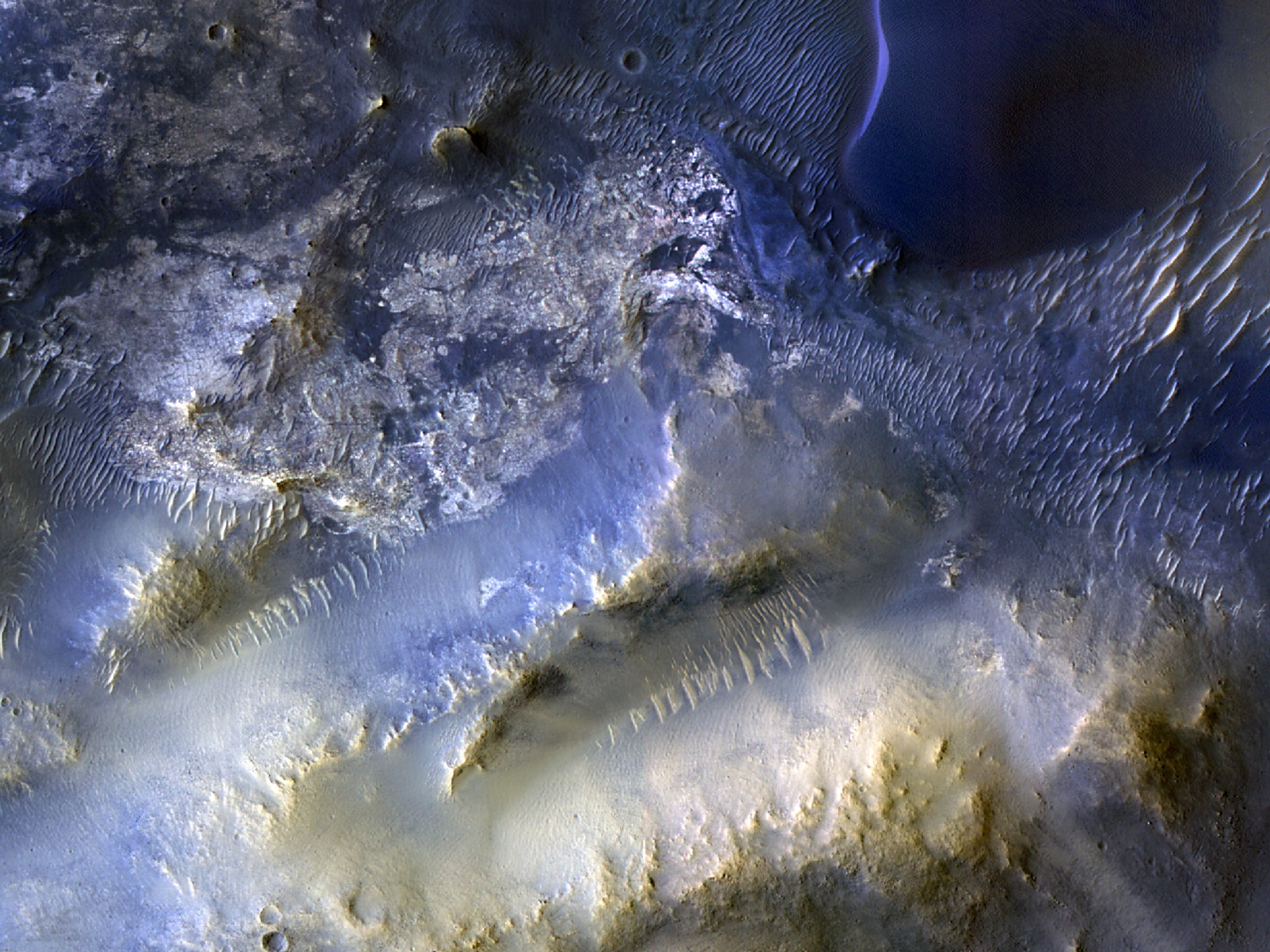
フローガーグ・クレーターは、火星南部高地に広がる幅約240kmの盆地で、ほとんどの険しい地形がクレーターで密に覆われています。クレーターの底の半分も険しく、一部は標高約1kmまで高くなっています。この岩場を横切る谷が見えますが、おそらく風と溶岩の流れによって形作られたものです。
フライトをお楽しみください。そして、カメラが通るルートや旅の途中で見た主要な特徴が強調されているエリアの地図もぜひご覧ください。これらの特徴はナレーションでも示されています。
火星での空中冒険を続けたいですか?火星表面を横断する他の火星エクスプレスのフライトは、ニリ・フォッサエ、アレス・ヴァリス、ザンテ・テラ、ノクティス・ラビリンサス、ジェゼロ・クレーターへと連れて行くことができます。
ビデオの制作方法
このビデオは火星特急が火星表面を飛ぶ様子を表しているわけではありません。
これは、ミッションの高解像度ステレオカメラ(HRSC)の単周観測から作成された画像モザイクであるMars Express高解像度ステレオカメラ火星チャート(HMC20W)のデータを使用して作成されました。モザイク画像は20°S/17°Eを中心に位置し、デジタル地形モデルの地形情報と組み合わせて三次元の風景を生成します。
ビデオの1秒ごとに、あらかじめ定められたカメラ経路に従って50フレームがレンダリングされます。アニメーションに使われる垂直方向の誇張は三つあります。雲や霞などの大気効果が地形モデルの限界を隠すために追加されています。霞は250km先から積もり始めます。
マーズエクスプレスのHRSCカメラはドイツ航空宇宙センター(DLR)によって運用されています。カメラデータの体系的な処理はベルリン・アドラースホフのDLR惑星研究所で行われました。FUベルリンの惑星科学・リモートセンシング作業部会は、このデータを用いて映画を作成しました
ESA’s Mars Express takes us on a journey across the southern highlands of Mars to Flaugergues Crater.
The video begins by tracking along a swathe of ground enclosed by two steeply sloping and roughly parallel cliffs – or escarpments – named Scylla Scopulus and Charybdis Scopulus (to the left and right, respectively). This ’path’ of ground is called a graben, created as tectonic plates pulled apart. It measures about 75 km wide by 1 km deep.
The prominent, 150-km-wide Bakhuysen Crater can be seen to the left.
The camera continues travelling northwards, approaching Flaugergues Crater in the distance. It moves along the crater’s eastern side before circling around to the left and ending at its western rim.
Flaugergues Crater is a roughly 240-km-wide basin found in Mars’s southern highlands, where most of the rough terrain is densely covered in craters. Half of the crater floor is also rugged, with parts rising up to elevations of around 1 km. We see a valley crossing this rocky patch, which was likely shaped by flows of wind and lava.
Enjoy the flight, and be sure to view the associated map of the area, which shows the route taken by the camera and highlights the key features seen throughout the journey. These features are also indicated in the voiceover.
Want to continue your airborne adventures on the Red Planet? Other Mars Express flights across the martian surface can take you to Nili Fossae, Ares Vallis, Xanthe Terra, Noctis Labyrinthus, and Jezero Crater.
How the video was made
This video is not representative of how Mars Express flies over the surface of Mars.
It was created using data from the Mars Express High Resolution Stereo Camera Mars Chart (HMC20W), an image mosaic made from single orbit observations of the mission’s High Resolution Stereo Camera (HRSC). The mosaic image, centred at 20°S/17°E, is combined with topography information from the digital terrain model to generate a three-dimensional landscape.
For every second of the video, 50 separate frames are rendered following a pre-defined camera path. The vertical exaggeration used for the animation is three-fold. Atmospheric effects, like clouds and haze, have been added to conceal the limits of the terrain model. The haze starts building up at a distance of 250 km.
The HRSC camera on Mars Express is operated by the German Aerospace Center (DLR). The systematic processing of the camera data took place at the DLR Institute for Planetary Research in Berlin-Adlershof. The working group of Planetary Science and Remote Sensing at FU Berlin used the data to create the film
<ひとこと>: 大判はイメージをクリック(タップ)。
Feb 04, 2026











 火星と地球が太陽の反対側に位置し、火星の探査機との火星ミッションの接触が不可能になる期間、太陽との合から解放される中で、NASAは、NASAのディープスペースネットワークと米国国立科学財団のグリーンバンク天文台を使って、メイブン(MAVEN)宇宙船との連絡の試みを再開した。この宇宙船の最後の情報は12月6日だった。
火星と地球が太陽の反対側に位置し、火星の探査機との火星ミッションの接触が不可能になる期間、太陽との合から解放される中で、NASAは、NASAのディープスペースネットワークと米国国立科学財団のグリーンバンク天文台を使って、メイブン(MAVEN)宇宙船との連絡の試みを再開した。この宇宙船の最後の情報は12月6日だった。